The purpose of Adaptive Seeking Velocity Optimization is adjust the Afterflow Time and/or Close Time to influence the plunger to arrive at a given velocity/time. This helps to both ensure consistent runs and provide a means to autonomously adjust to changing well conditions.
Patents
Velocity/Time Optimizations Basics
Timing of Adjustments
The controller makes adjustments on each plunger cycle when the plunger arrives or when the Rise Time expires. These adjusted times will be used immediately.
Adjusting Times Proportionally
To ensure that the adjustments match the current operational state of the well, the main factor in calculating the change is based on the current Afterflow or Close Time.
The controller calculates the adjustment based on the current value of these times multiplied by a Miss Percentage and a Scaling Factor.
This means that a well that is flowing/closed for a long period of time will experience larger adjustments. Wells that are flowing/closed for a shorter amount of time will experience smaller adjustments. The net result is a system that automatically adapts to the current conditions.
Miss Percentage
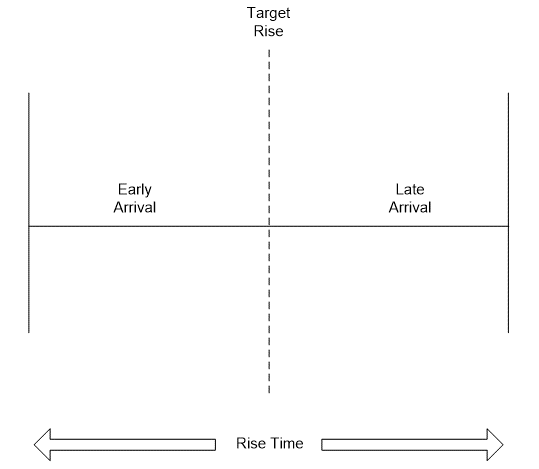
The adjustments are based on the Actual Rise Time of the plunger compared to the Target Rise Time. This represented as a percentage (%) that the target was missed.
Example
- Let’s assume
- Rise Time is 10 minutes
- Target Rise is 5 minutes
- There is a 5 minute early arrival window and a 5 minute late arrival window
- If the plunger arrives at 4 minutes
- It is 1 minute early out of 5 minutes
- This is 20% early
- If the plunger arrives at 7 minutes
- It is 2 minutes late out of 5 minutes
- This is 40% late
Scaling Factor
The Scaling Factor is used to reduce the Miss Percentage to dampen the response. There is both a Close Scaling Factor and an Afterflow Scaling Factor so that the algorithm can be set as unbalanced.
Without the Scaling Factor, the plunger arrival could be at one end of the window or the other causing an adjustment of 100% or more.
Velocity/Time Optimization Modes
The optimization mode is set by doing the following:
- Press the install button
- Navigate up or down to Optimize and press select
- Find Optimize Type and press select
- Pick one of the following options in the sections below.
Afterflow (Gas)
The goal of this mode is to maximize Afterflow Time or sales. The controller will only make adjustments to the Afterflow Time. Regardless of the adjustments that are made, the Afterflow Time will never go outside the bounds set by Minimum and Maximum Afterflow Time.
The following outlines the calculation that is used to determine the adjustment:
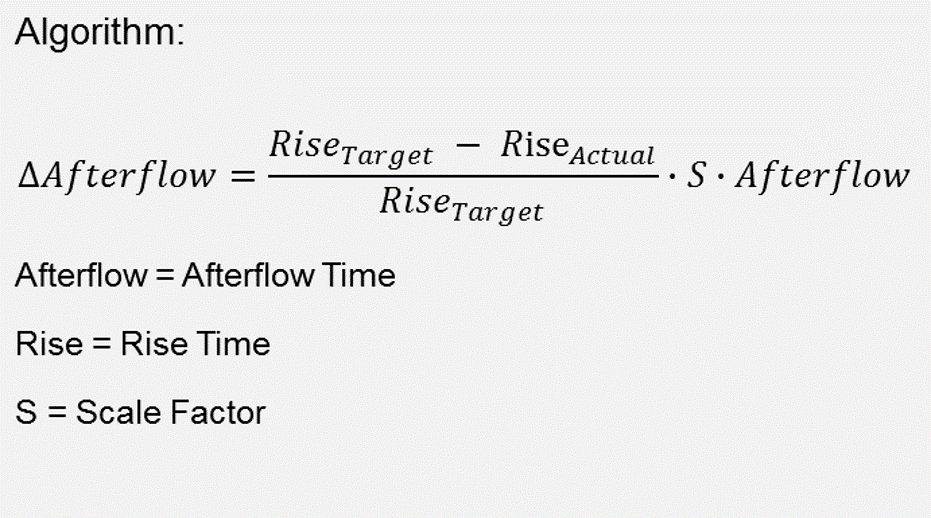
A fast/early arrival will cause time to be added to Afterflow Time to hold the plunger at surface longer allowing more fluid to build. This additional fluid will slow the plunger ascent on subsequent rise cycles.
Conversely, a slow/late arrival will cause a reduction in the Afterflow Time to send the plunger to bottom sooner to retrieve smaller batches of fluid. The lighter fluid load will cause the plunger to arrive more quickly on subsequent cycles.
Close (Oil)
The goal of this mode is utilize the available gas to lift as much oil as possible and minimize Close Time. The controller will only make adjustments Close Time. Regardless of the adjustments that are made, the Close Time will never go outside the bounds set by Minimum and Maximum Close Time.
The following outlines the calculation that is used to determine the adjustment:
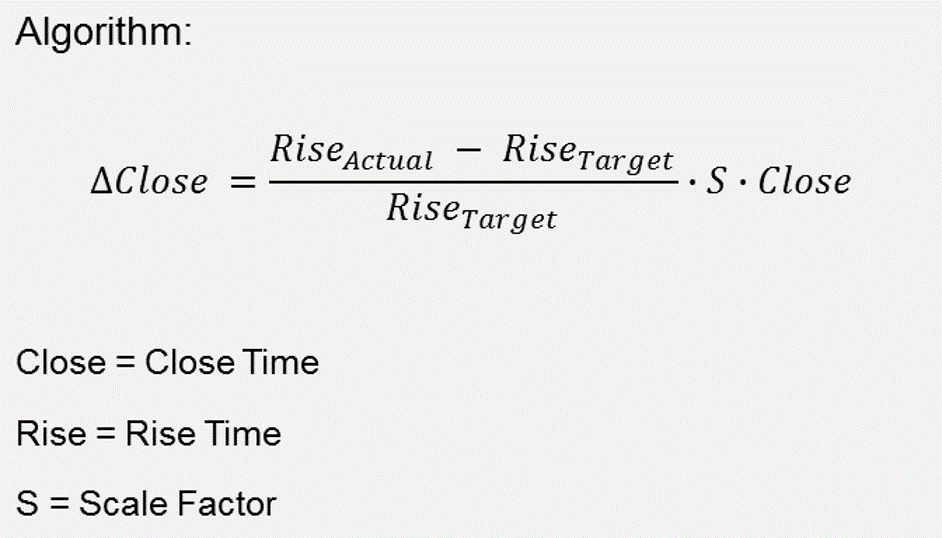
A fast/early arrival will cause time to be subtracted from the Close Time, reducing the amount of pressure build that occurs. The lower amount of lifting pressure will cause the plunger to arrive more slowly on subsequent rise cycles.
Conversely, a slow/late arrival will cause time to be added to the Close Time to hold the plunger at bottom longer while the pressure builds. This additional pressure will increase the lifting capability and rise the plunger more quickly on subsequent cycles.
Close then Afterflow (Oil then Gas)
The goal of this mode is to first help dewater a well efficiently and then maximize production second. The controller works to minimize Close Time and then it switches to maximizing Afterflow Time.
The logic works the same as in the above two independent modes. If the plunger starts to arrive slowly, it will first reduce the Afterflow Time. Once the Afterflow Time reaches Minimum Afterflow Time, then it will start to add to Close Time.
Afterflow Optimization Example
This example shows what would happen given a set of parameters. You can take this and plug in your own setup if you would like to see what to expect.
Timers
- Rise Time = 0:20:00 (20 minutes)
- Target Time = 0:05:00 (5 minutes)
- Afterflow Time = 1:00:00 (1 hour)
- Afterflow Scaling Factor = 10%
Fast/Early Arrival Case
This shows a case where the well is currently flowing for 1 hour. The plunger arrives 3 minutes after we start Rise:
- Actual Rise Time = 3 minutes
- Miss % = (5 – 3)/5 = 40%
- Scaled Adjustment = 4%
- Afterflow Time Adjustment = 1:00:00 x 4% = 0:02:24
- New Afterflow Time = 1:02:24
As you can see, the fast plunger caused 2 minutes and 24 seconds to be added to Afterflow to build more fluid and slow the plunger down on the next rise.
Slow/Late Arrival Case
This shows a case where the well is currently flowing for 1 hour. The plunger arrives 15 minutes after we start Rise:
- Actual Rise Time = 15 minutes
- Miss % = (5 – 15)/5 = -200%
- Scaled Adjustment = -20%
- Afterflow Time Adjustment = 1:00:00 x -20% = -0:12:00
- New Afterflow Time = 0:48:00
As you can see, the slow plunger caused 12 minutes to be subtracted from Afterflow to drop the plunger quicker to bring up less fluid and speed up the plunger.