The Sasquatch uses the same Geomagnetic Sensing Technology that is found in the Cyclops. Instead of having a single eye, Sasquatch has 2 eyes and a bigger footprint (Get it… Bigfoot…. Sasquatch).
Patents
Arrival Detection
The Sasquatch by default will take magnetic readings and apply a filter to remove the high frequency noise. These filtered readings are then both incorporated into the long term baseline and used to determine whether the plunger has arrived.
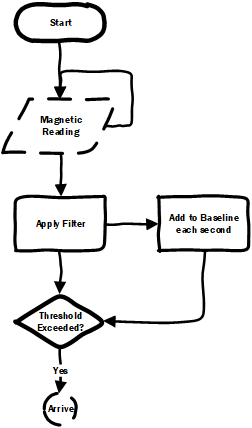
Once the signal has exceeded the baseline by at least the threshold (defined by the sensitivity switch), the plunger is considered arrived. In the case of the Sasquatch, the output is not set until the velocity has been calculated and made available. This prevents the control system from reading the velocity before it is ready.
Post Arrival Operations
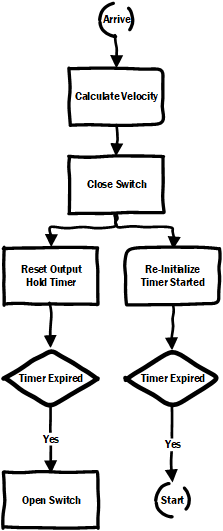
Once the Sasquatch has detected the arrival, it calculates the velocity, sets and holds the output switch, and then re-initializes once the plunger has departed to avoid recording numerous arrivals as the plunger bounces around at surface.
Velocity Calculation
Once an arrival has been detected, the Sasquatch gathers data, and uses it to determine the velocity.

The velocity is calculated by correlating the time difference between signals gathered from multiple magnetic sensors. This time shift combined with the fixed distance between sensors is used to determine the velocity.
Switch Closure and Hold
Once the velocity is calculated, the output switch is held for the Minimum Output Hold Time. By default the Output Hold Timer is continuously reset while the plunger continues to move in front of the plunger.
Re-Initialization
Once the plunger has departed, the Sasquatch starts an Re-Initialization Timer. This is used to ensure that we do detect another arrival for a minimum amount of time. Often a plunger can hang around surface or arrive several times in a short span and could get counted as separate arrival events.