Vision Device Management is a tool provided by ETC that allows you to interact with our controls and sensors.
Video Tutorial
Connectivity
First make sure that you have established a path of connectivity to the device.
Serial
If connecting to a controller or Sasquatch, plug in cable from a serial port on the PC to the RS-485 port on the device.
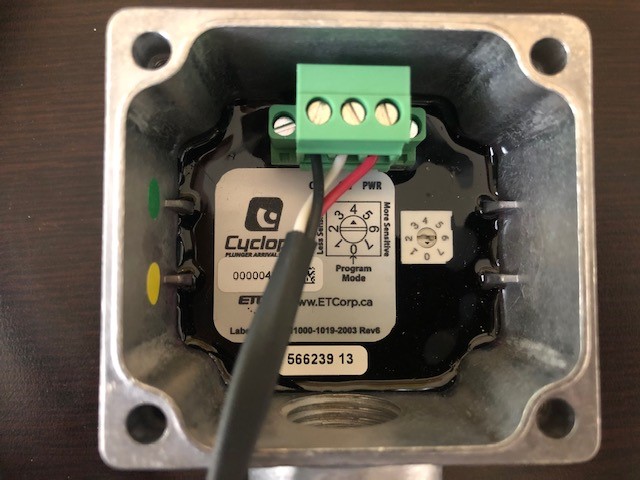
For the Cyclops, we connect SIG to A on Link.

TCP
TCP can be used to connect to a remote controller that is attached to a device that has an IP address and can accept an incoming connection.
TCP can also be used to connect to a simulator running on a PC.
Configure and Connect
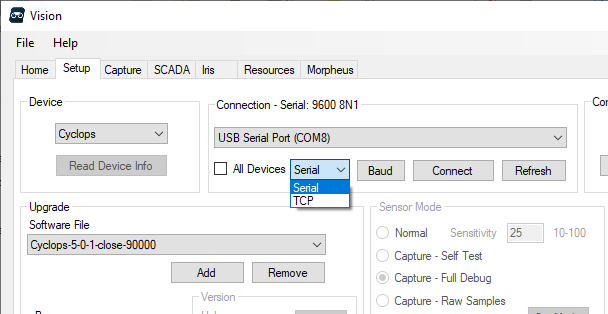
- Select the device type: Cyclops, Sasquatch, Plunger Lift Controller
- Set the connection type by selecting Serial or TCP.
2. Configure the connection
Serial
- Select the communication device.
- Link or other USB to RS-485 devices will appear as a USB serial port
- If you plug a USB device in after opening Vision, click Refresh to check for new USB devices.
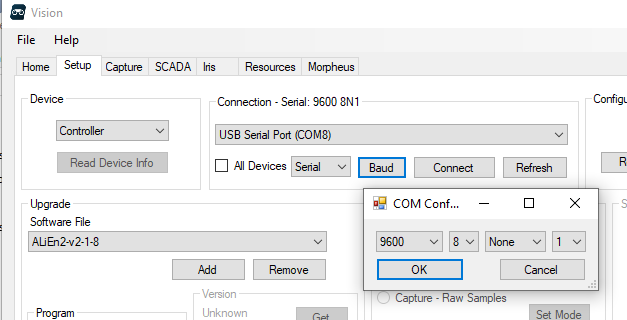
- Click Baud to change the serial settings.
TCP
- Specify the IP address and port in the Connection Dialog
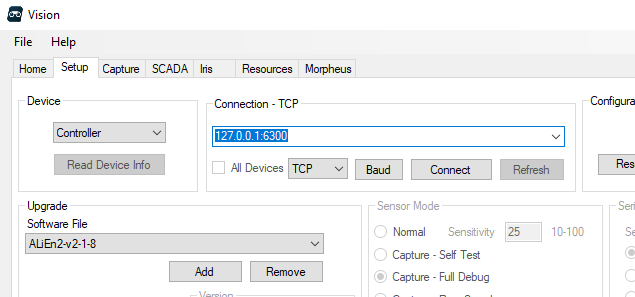
3. Click Connect